Provide information about CAN bus off status.
None (Main library). (See Section 2.3, “Licensed Features”.)
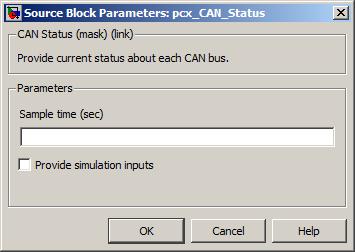
Provide the bus off state of each CAN bus as an outport. A CAN bus goes bus off when sufficient errors have been detected by the CAN transceiver. See the Bosch CAN specification from their web site (http://www.can.bosch.com) or the ISO specification for more details.
When CAN bus off condition is detected, CAN transmission activity is suspended. A transmission is then tempted periodically in order to check whether bus off condition has been resolved. After bus off condition is resolved, transmission resumes as normal.
Only used during simulation. Set to 1 to simulate a CAN bus off state for CAN bus 0, zero otherwise. Only available if the mask parameter Provide simulation input is checked.
Value type: Boolean Calibratable: No Only used during simulation. Set to 1 to simulate a CAN bus off state for CAN bus 1, zero otherwise. Only available if the mask parameter Provide simulation input is checked.
Value type: Boolean Calibratable: No
Not all OpenECU modules have both CAN buses populated (see Section 1.1, “ECU hardware reference documentation” for details about each device).
This block became deprecated in version 1.8.4 and will be removed in a future version of the software. Please change to use the Section 5.1.12, “CAN bus status (pcx_BusStatus)” block.