Provide information about the error status of a CAN bus.
None (Main library). (See Section 2.3, “Licensed Features”.)
Provide the current error state of a CAN bus, one of error-active, error-passive or bus-off. See the Bosch CAN specification from their web site (http://www.can.bosch.com) or the ISO specification for more details.
In addition to the usual CAN bus-off error handling performed by the CAN controller, when a CAN bus-off condition is detected by the software, the software temporarily suspends CAN message transmission. A transmission is then attempted periodically in order to check whether the bus-off condition has been resolved. After the bus-off condition has been resolved, the software resumes message transmission as normal.
A dummy input for simulation purposes only. Set to zero to simulate an error-active state, set to 1 to simulate an error-passive state, and set to 2 to simulate a bus-off state. Only available if the mask parameter Provide simulation inputs is checked.
Value type: Integer Calibratable: No
Set to zero if the CAN bus selected through mask parameter CAN Bus Identifier is in the error-active state, set to 1 if in the error-passive state, and set to 2 if in the bus-off state.
Range: [0, 2]
Value type: Integer Calibratable: No
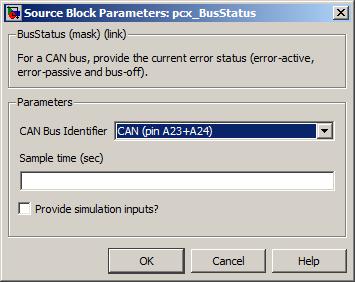
Which CAN bus to provide error state information about.
Value type: List Calibratable: No The periodicity of the block execution.
Range: [0.001, 3600] seconds
Value type: Real Calibratable: No If selected then simulation inport sim_bus_state is made available.
Value type: Boolean Calibratable: No