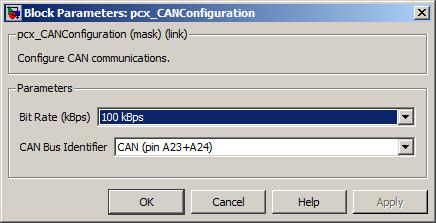
Specify the configuration for a CAN bus.
None (Main library). (See Section 2.3, “Licensed Features”.)
Specify the baud rate for a CAN bus. Some OpenECU devices support more than one CAN bus, in which case, more than one CAN configuration block is required to configure each.
Some ECUs include CAN bus termination internal to the ECU, whilst some do not. Where CAN bus termination is not provided by the ECU, termination must be provided external to the ECU. Robust CAN communication requires correct termination. No termination or double termination can result in intermittent CAN messaging.