Retrieve the current crankshaft wheel angle.
None (Main library). (See Section 2.3, “Licensed Features”.)
The pan_CurrentCrankAngle block retrieves the current angle of the crankshaft wheel encoder, relative to crank zero degrees (see Section 6.1.3, “Crankshaft zero degrees”). The retrieved value is taken from the angle clock, which is an estimate of crank decoding and position identification process (Section 6.1.4, “Angle clock”).
Set to zero when the ECU cannot provide a crank angle (for instance, the ECU has not gained region synchronisation with the crankshaft wheel encoder), or set to one when the outport angle is valid.
Value type: Boolean The estimated angle of the crankshaft wheel. If the crank wheel is primary, then the value is taken from the angle clock (which is itself an estimate of the wheel position between teeth). If the crank wheel is secondary, then the value is taken from the last decoded tooth (and therefore with reduced resolution).
Range: [0, 360) ° crank Resolution: at least 0.1 degrees, for the primary crank wheel Resolution: per tooth for secondary crank wheels
Value type: Real
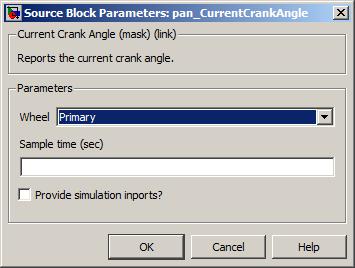
A drop down to identify the crankshaft wheel for angle measurement. The selection of wheel must match a pan_CrankWheelConfig block elsewhere in the model.
Value type: List Calibratable: No The periodicity of the block execution.
Range: [0.001, 3600] seconds, or -1 to inherit the sample time
Value type: Real Calibratable: No Tick to enable inports sim_valid and sim_angle.
Value type: Boolean Calibratable: No