Debounce a transient fault signal into a confirmed fault signal using a leaky bucket algorithm.
None (Main library). (See Section 2.3, “Licensed Features”.)
Debouncing of a transient fault signal is achieved using a leaky bucket algorithm. A leaky bucket integrator is used to decide when an input is confirmed as faulty as a function of its current state, which may be only transiently in error.
The bucket always has a total volume or depth of unity (1.0). When the input is deemed to be in error (e.g. out of range), water is poured into the bucket at some rise rate. At all times water flows out of a leak in the bottom of the bucket with some fall rate until it is empty. If the bucket should ever fill to the brim by reaching a depth greater than or equal to 1.0, the input is confirmed as faulty. Should the bucket subsequently empty to below its hysteresis depth, it is no longer confirmed as faulty.
Result of processing transient_fault through a leaky bucket algorithm over a number of block iterations.
Range: 0 or 1 (no fault, fault)
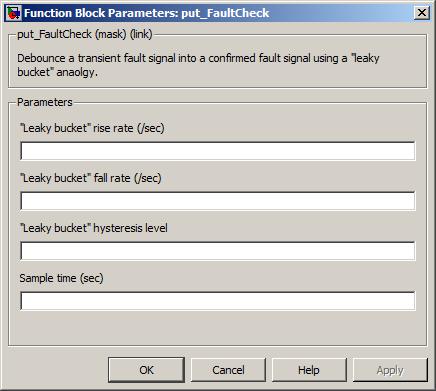
Rate at which leaky bucket is filled when input is faulty in some respect.
Range: [0, 1000] /sec
Rate at which leaky bucket is emptied if it is not already empty.
Range: [0, 1000] /sec
Level below which bucket depth must fall before fault is no longer considered faulty. If set to a negative value, fault remains latched. As a special case, if the hysteresis depth is set negative, should the input ever reach a confirmed fault state it remains "latched" there until the ECU device is powered down.
Range: [-inf, inf] unitless
The periodicity of the block execution.
Range: [0.001, 3600] seconds
Value type: Real Calibratable: No